Diciembre 2015 - Demostración en el Mirador de Chipeque
Demostración realizada en Tenerife. La exposición del funcionamiento tuvo lugar en la Dirección General de Seguridad y Emergencia, donde asistieron técnicos del Cabildo de Tenerife y de la propia Dirección General. Los asistentes destacaron la capacidad de plasmar en tiempo real la información de la evolución de un incendio y el despliegue de sensores rápido, sencillo, económico y robusto.

Diciembre 2015 - Demostración en El Vedat
Demostración realizada en Torrent, Valencia, con técnicos del Municipio de Torrent, Medio Ambiente y empresas valencianas. El acto fue organizado por la empresa Medi XXI que mostró interés en que se realizara esa demostración en Valencia. Los comentarios fueron en la misma línea a los recibidos en pruebas anteriores.

Julio 2015 - Desarrollo del sistema UAV multirroto
Colocación y adaptación a la plataforma de cada uno de los componentes sobre el modelo Y6 de 3D Robotic. La IMU, que fue colocada junto al GPS del dron, la conexión con el piloto automático del dron, la plataforma Raspberry Pi, sobre la que realizaremos toda la programación de la aplicación y la cámara web utilizada.

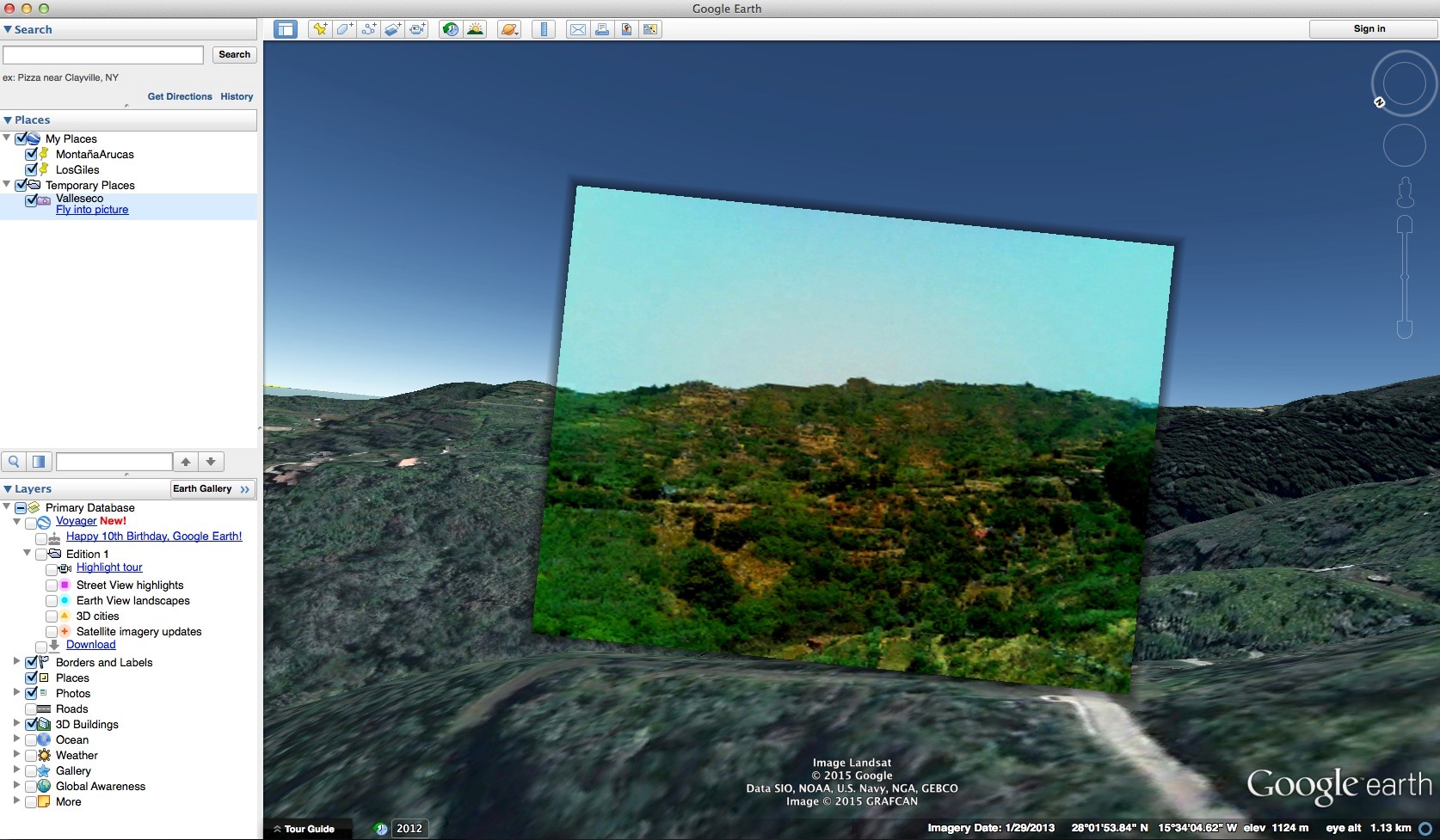
Integración de los programas encargados de capturar las imágenes y adición de los datos que van a permitir realizar una georreferenciación. Se utiliza una superposición entre la imagen tomada y la perspectiva obtenida en Google-Earth.