Integración del Sistema Iridium en UAV Multirrotor para el Control Remoto mediante Comandos MAVLink
Imágenes

 Fecha: 18 de julio de 2014
Fecha: 18 de julio de 2014
Autora: Dimitriya Angelova Poparova
Tutores: Víctor A. Araña Pulido y Francisco J. Cabrera Almeida
Resumen del TFM:
En el IDeTIC, varios estudiantes llevan trabajando más de un año en una línea de investigación sobre UAVs multirrotor. Actualmente existen dos formas de comunicarse y enviar comandos al piloto automático de estos UAVs – por conexión USB con la placa de piloto automático (APM), lo cual no puede realizarse durante el vuelo, o por medio de una radio de telemetría que opera en la banda de 433 MHz, pero que no dispone de suficiente potencia como para garantizar un radioenlace fiable cuanto el UAV se encuentra lejos de la estación terrestre (GCS). La solución propuesta consiste en utilizar un sistema de comunicación vía satélite que permita llevar a cabo la comunicación con el UAV independientemente de su posición y distancia con respecto a la estación terrestre.
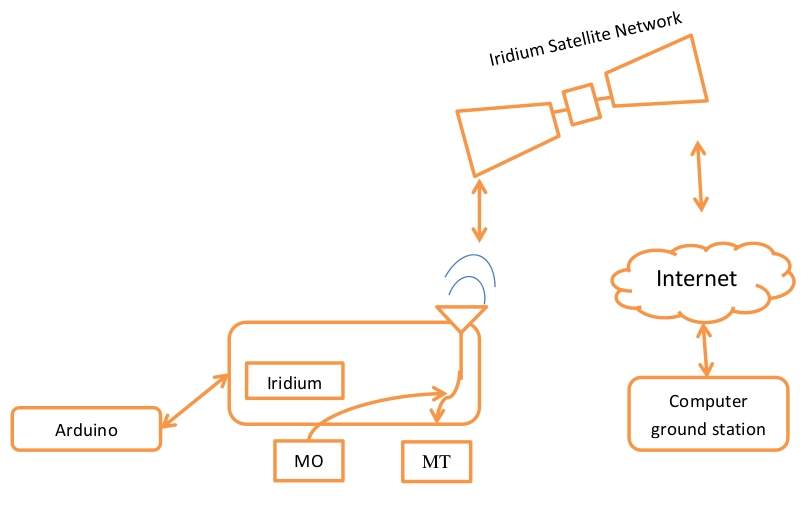
La solución se implementará sobre una placa de desarrollo Arduino, que se trata de un sistema de desarrollo hardware y software de código abierto. Las placas de desarrollo Arduino están basadas en diversos controladores de la marca ATMega y tienen un consumo muy reducido. Por medio de una comunicación serie se conectará la placa Arduino a un transceptor Iridium, que mediante el uso del servicio SBD (Short-Burst Data) permitirá intercambiar mensajes de telemetría del UAV. Adicionalmente se conectará también un GPS externo a la placa de desarrollo Arduino de modo que sirva de sistema de posicionamiento de emergencia, en caso de que el piloto automático sufra una avería y no pueda determinarse la posición del UAV con el GPS primario.
El objetivo final de este Trabajo fin de Máster es implementar un sistema de comunicaciones bidireccional utilizando la red de satélites Iridium, de forma que se pueda tener cobertura global para controlar remotamente el UAV mediante el envío de comandos MAVLink.
For more than a year in the IDeTIC there have been students working with UAVs. By now two ways of communication are used for sending commands to the autopilot - by hardware connection to the APM which is not possible to be used while the ArduCoper is flying, or by 433 MHz radio frequencies which could be used while the copter is in motion but does not provide enough quality of the signal when the copter is far away from the ground control station (GCS). The solution of providing a reliable communication that can be used independent on the distance is to set the connection between the APM and the ground station via the satellite network, which will give the opportunity to send and receive commands on unlimited distances.
Arduino is an open-source physical computing platform based on a simple microcontroller board and a development environment for writing software for the board. It will be connected to an Iridium single board transceiver allowing short-burst data (SBD) connectivity to the Iridium satellite network. An ArduCoptetr, which is an open source multicopter UAV based on the Arduino platform, will also be connected to the Iridium and Arduino.
The objective of the current project is to implement a bidirectional communication system for the ArduCopter model to send flight commands and receive telemetry – altitude, longitude, latitude. The solution will use Iridium transceiver and Ardupilot system. As a backup decision for receiving the coordinates of the copter, a GPS could be attached.